
LINE公式アカウントから最新記事の情報を受け取ろう!
![]()
研究者・技術者の『知りたい』がここにある



2022年8月12日、コミックマーケット100開催前日。私はAFK研究所合同会社にお邪魔していた。実は今年の7月、AFK研究所合同会社の代表・近藤さんと共同研究し、ロボットを活用してヤリマンボウ形態異常個体の遊泳実験を行い、論文を出版したのだが、近藤さんから「ロボットを操縦できるので良かったら遊びに来て下さい」とのお誘いを受けていたこともあり、コミケのために東京に出てきたタイミングで、今回お邪魔したのだ。
事の発端は、2021年11月に福井県水産試験場栽培漁業センターの職員の方から「ヤリマンボウ獲れたけどいる?」という旨のメールを頂いたことから始まった。体サイズを確認すると自宅で保存できるサイズだったので有難く頂くことにした。日本ではヤリマンボウは毎年獲れることは獲れるが、狙って獲れるのかと聞かれれば獲れないので珍しい魚だ。水族館で泳いでいるマンボウと形態的にどう違うのかと言うと、ヤリマンボウはマンボウより体全体が卵形(鶏卵に似ている)で、舵鰭中央部のやや背側が後方に突出していることなどが特徴だ。しかし、頂いたヤリマンボウは形態異常個体(つまり奇形)で、左胸鰭は矮小化し、臀鰭が短縮していた。ヤリマンボウの形態異常個体自体が学術的に報告されていなかったので、論文化しようと考えていたのだが、この時ふと、臀鰭が短くてちゃんと泳ぐことができたのか?という疑問も浮かんだ。ヤリマンボウの正常個体は、背鰭と臀鰭がほぼ同じ形態で、それらをペンギンの翼のように同じ方向に振って泳ぐ。漁獲されたということは、この形態異常のヤリマンボウも海の中で泳いでいたはずなのだが……臀鰭が背鰭より短くアンバランスに思える。

ヤリマンボウ自体が珍しいし、臀鰭を短く切断して泳げるかどうかを観察するなんて倫理的にも難しい。しかし、ロボットなら検証可能なのではないかと閃いた! この時ちょうど、私は近藤さんがマンボウ型ロボットの開発に成功していたのを知っていたのだ。
近藤さんとの出会いはTwitterである。近藤さんはロボ化石というプロジェクトを行っていて、去年「マンボウのロボットを作っているので協力して欲しい」とオファーがあり、私は協力していたのだ。そんなつながりもあり、今度は私が近藤さんにヤリマンボウの形態異常個体のロボットが作れないかと相談し、近藤さんの娘や、近藤さんの知人である陽凪さん姉弟の協力も得てマンボウロボットをベースに新たに作製し、実験結果を踏まえて2022年に論文として出版できたという流れである。
AFK研究所合同会社で近藤さんとお話をしていると、陽凪さん姉弟もやって来た。今回の論文の第二著者でもある陽凪さんにも、マンボウの解剖やマンボウロボットを作った感想を聞いてみた。陽凪さんはこれまでに数えきれないくらいの魚種を解剖し、胃内容物を調査したり、骨格標本を作製してきた。マンボウを解剖したのは今回が初めてだったが、皮下ゼラチン層が厚く、腸が長いことにビックリしたという。また、筋肉の筋を引っ張ると関連している鰭などが動くので、それが分かりやすくて面白かったとのこと。マンボウのロボットはAFK研究所合同会社に通った1回目で素材から各パーツの形を切り出し、2回目で回路などを埋め込んで動くようにして、その後持ち帰って自宅のお風呂で泳ぐように試行錯誤し、3回目でAFK研究所合同会社のプールで上手く泳ぐように調整し、完成させたという。

近藤さんによると、マンボウロボットは先行研究として、東海大学海洋科学博物館や海洋楽研究所で作られたことがあるが、あまり上手く泳がなかったそうだ。近藤さんは先行研究の事例と自分自身の経験を照合して、情報を取捨選択して、独自のマンボウロボットを考案した。水中ロボットは防水も兼ねて金属でガチガチに固めてしまいがちだが、重くなり、可動性もなくなるのが問題点だ。生物を模した水中ロボットは泳がなければならないので、水に近い浮力と生き物に近い剛性と柔軟性を持った素材選びが重要となる。そこで近藤さんが選んだのはポリプロピレン。これでモーター、電池、回路用防水容器を挟み込む構造にすることにより、軽量化かつ放熱性を高めることができ、電池消費を抑えて長時間泳がすことができるようになった。
また、マンボウの形態を模したロボットをそのまま泳がせると、水底へとどんどん沈んでいってしまう問題が発生した。この解決策として、私の「マンボウは夜に上を向くことが多い」という知見からヒントを得て、ロボットの基本姿勢を斜め上に上げた状態に設定し直すと、上手く真っすぐ泳がせることができるようになったとのことだ。マンボウの頭部にある筋肉に浮力を調節する機能があるのではないか?と近藤さんは推察している。ロボットからマンボウの体の機能を推測できるのは面白いと私は感じた。
いろいろ話をしているうちに、実際にマンボウとヤリマンボウのロボットを屋上のプールで泳がしてみようということになった。近藤さん、陽凪さん姉弟とともに屋上に向かう。まだ台風が来る前だったが、風が良い感じに吹いていた。早速、プールにそれぞれのロボットを入れ、泳がす様子を拝見する。すごい! ちゃんとマンボウ類っぽく背鰭と臀鰭で泳いでいる! マンボウ型のロボットだ! 近藤さんと陽凪さん姉弟が慣れた感じでロボットを泳がしている。プールにはメダカが飼われていたのだが、これは水質の維持とボウフラ対策として飼っているのだという。

「実際にロボットの操縦を体験してみて下さい」と近藤さんに言われ、ヤリマンボウのロボットを操縦してみることに。ラジコンで操縦できるのが近藤さん式ロボットの面白い点だ。最初はぎこちない動きだったものの、慣れると割とスイスイ泳がすことができる。これが結構楽しい。背鰭、臀鰭、舵鰭が別々に動くように設計されているので、それぞれの鰭をどのように動かせばロボットがどういう風に動くのかがよくわかる。物理学の世界だと思った。生物と言えど、物理環境の中で生きているので、ロボットの動きから実際の生物の動きをある程度予測することはできるなと実感した。
基本姿勢がやや斜め上だと、背鰭と臀鰭を同時に同じ方向に動かすと真っすぐ進む。しかし、背鰭だけ動かすと沈み、臀鰭だけ動かすと浮くことがわかった。面白かったのは、舵鰭が本当に舵取りの役割をしていることだった。曲がりたい方向に舵鰭を曲げて流しておくと、その方向に少しずつ曲がっていってくれる。一方、ロボットがプールの縁に正面から突っ込んでいった場合、なかなか曲がりづらいこともわかった。まさに水族館で壁に向かって一心不乱に泳ぎ続けているマンボウが再現されたのである。これはロボットをたくさん作って大きなプールで競争させたりできれば楽しいだろうなと思った。近藤さんに値段を聞いたところ、ラジコンも含めて材料は5万円あればマンボウ型ロボットは作れるとのことだった。
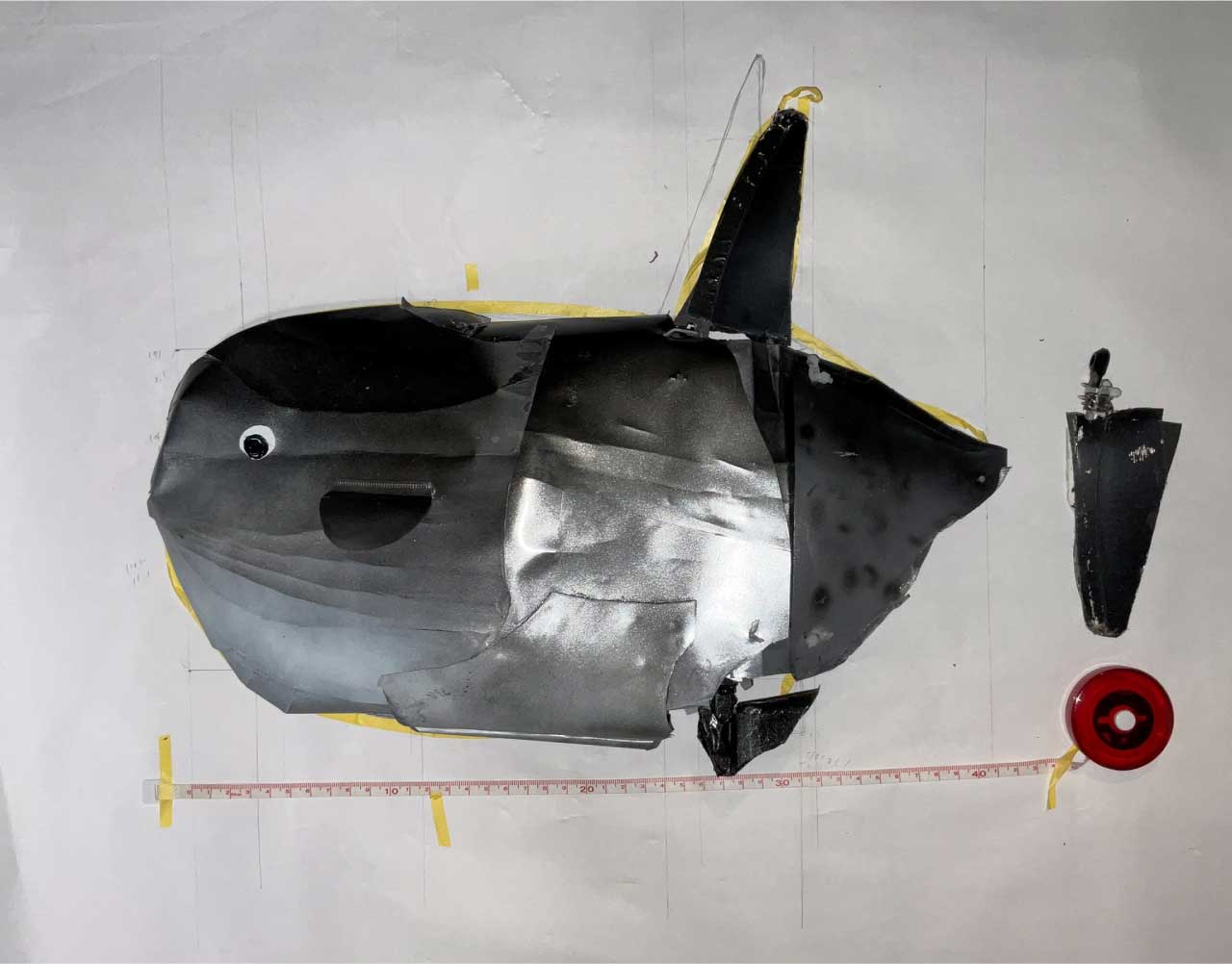
鰭は着脱可能なように作られているため、ヤリマンボウのロボットで臀鰭を付けたバージョンと臀鰭を外したバージョンで操縦させて頂いたのだが、確かに背鰭だけでも真っすぐ泳がせられることを実体験した。実際の形態異常のヤリマンボウは短い臀鰭が付いているのだが、ロボットは臀鰭を外した状態でも泳がせられたので、自然下でも問題なく泳いでいたものと考えられた(バランス的にはやはり臀鰭も正常なものが付いていた方が泳ぎやすかった)。

今回の論文著者3名で記念写真(左が近藤さん、真ん中が陽凪さん、右が私)。陽凪さんは、現在はヘリコプリオンという化石軟骨魚類のロボット作成に取り組んでいる。将来は水産系の研究者になりたいとのことで、ロボットも作れる魚類学者だと将来超有望だ! 一方、近藤さんはマンボウ科でまだ作っていないクサビフグのロボットを作り始めているとのことで、こちらも完成がとても楽しみだ。マンボウ型のロボットを開発する上で、様々な苦労・試行錯誤が行われていたことを今回改めて実感した。せっかくいろいろシミュレーションできるロボットがあるので、今後もマンボウの行動や体の機能を探る研究に活かしていきたいと考えている。
LINE公式アカウントから最新記事の情報を受け取ろう!
![]()


